
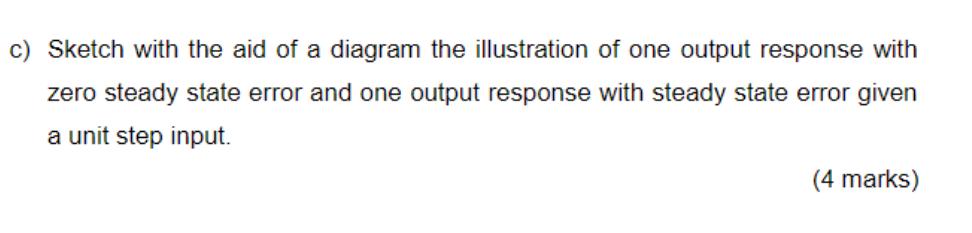
Zero steady state error and steady state error given a unit step input.
Hej! Jag försöker göra en exempeltenta i reglerteknik, jag undrar dock hur de visste hur de skulle rita upp grafen? Jag förstår att de ritat upp the unit step function men förstår inte hur de ritat output respnse with zero steady state error och en med steady state error?
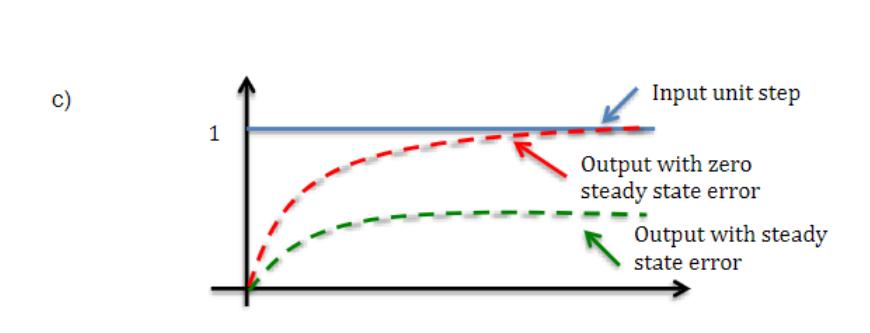
Facit:
Tack på förhand!

Hej!
Jag tror man bara är ute efter principen med vad som menas med ett kvarstående fel i en regulator. Som jag tolkar det så skulle "Unit step input" till exempel kunna vara en rumstermostat som man plötsligt höjer med en grad (börvärdet). Och "output response" är processvariablen, den uppmätta temperaturen i rummet som man ju gärna vill ska följa börvärdet på ett bra sätt.
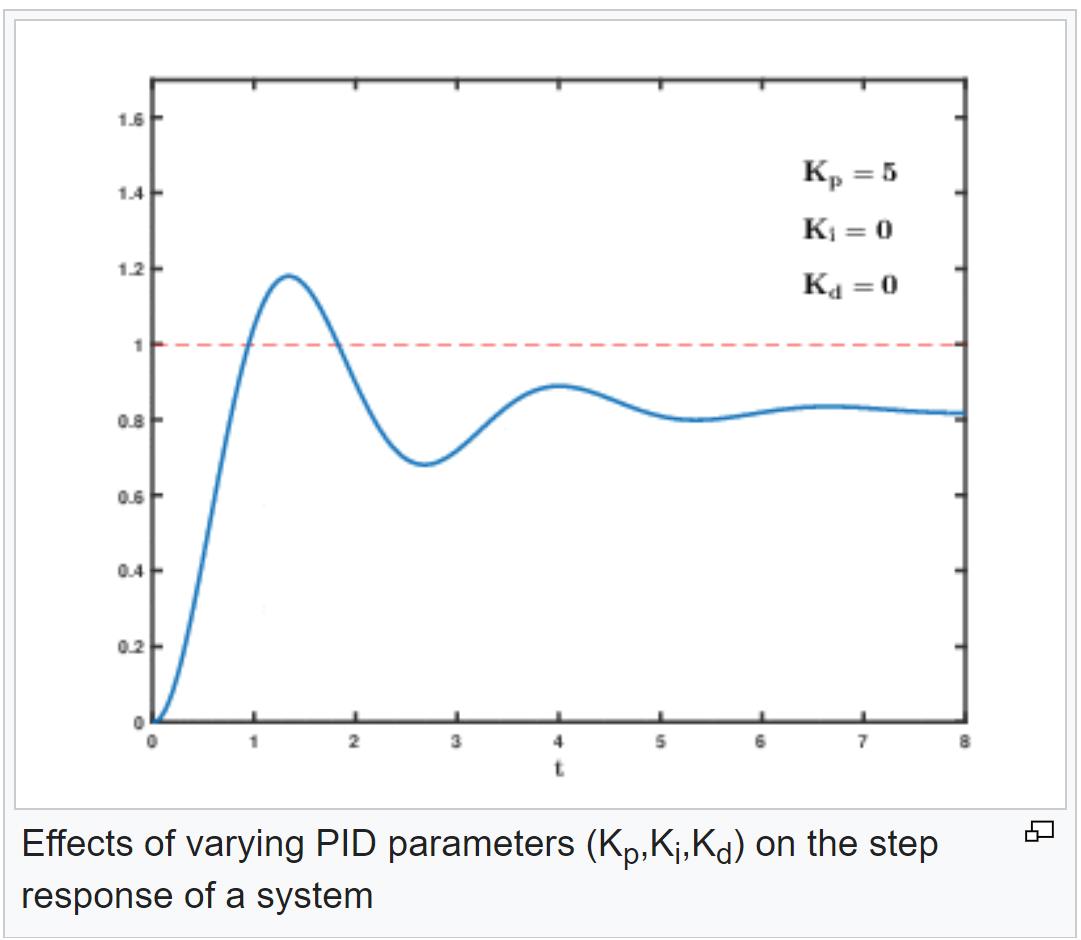
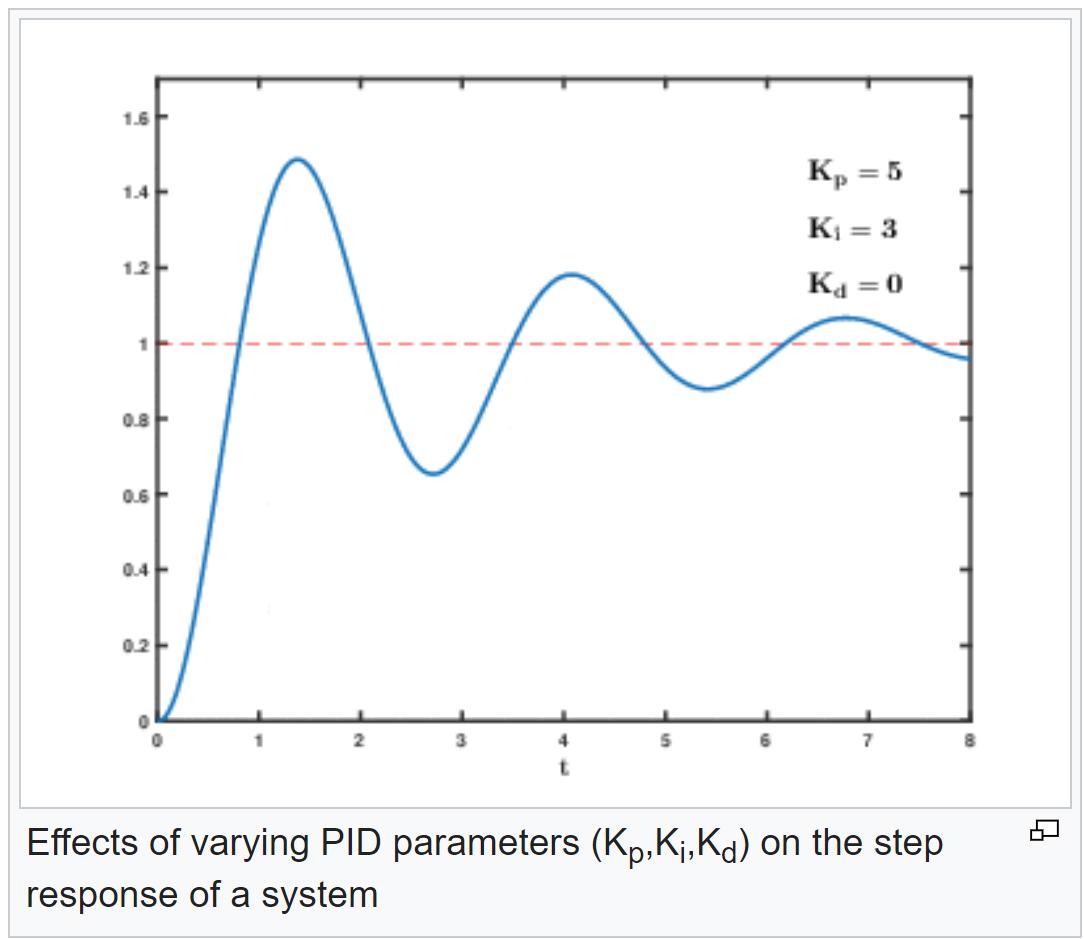
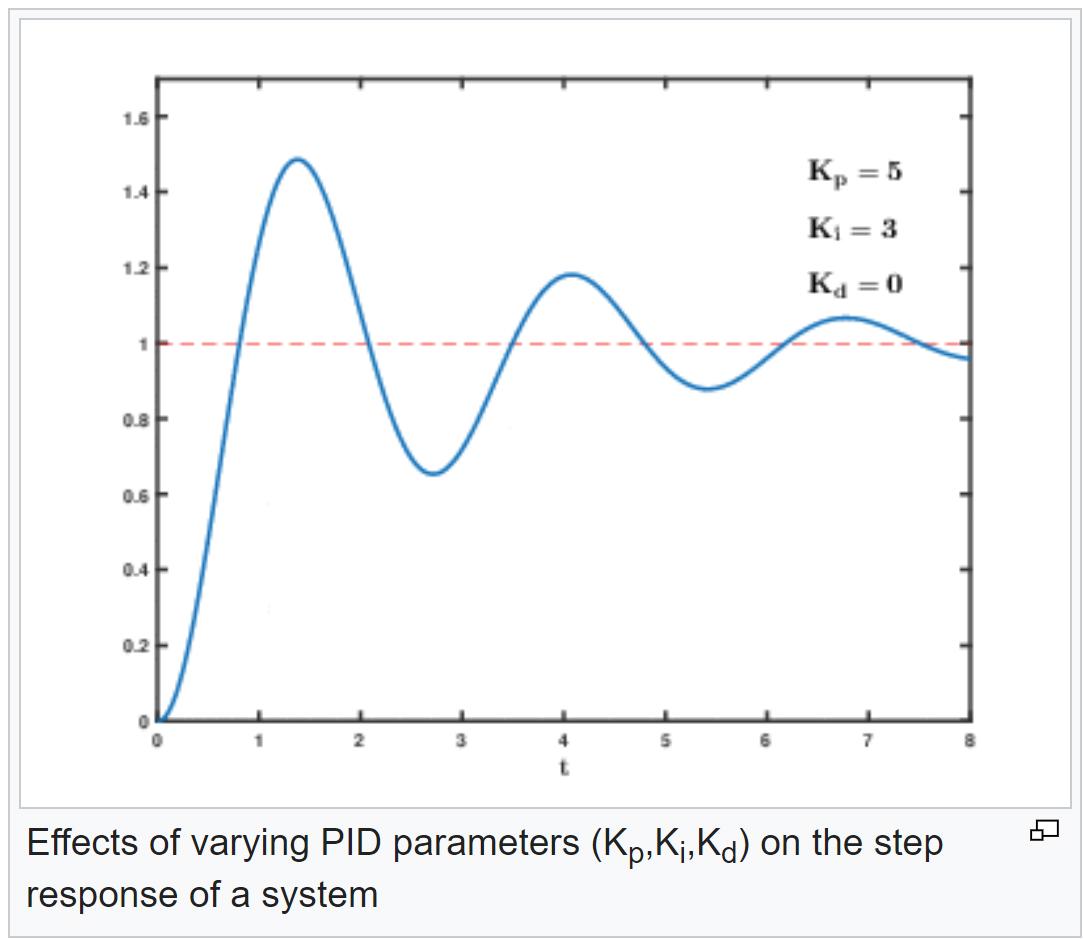
Nedanstånde bilder är saxat ifrån wikipedia https://en.wikipedia.org/wiki/Proportional%E2%80%93integral%E2%80%93derivative_controller "Manual tuning"-sektionen.
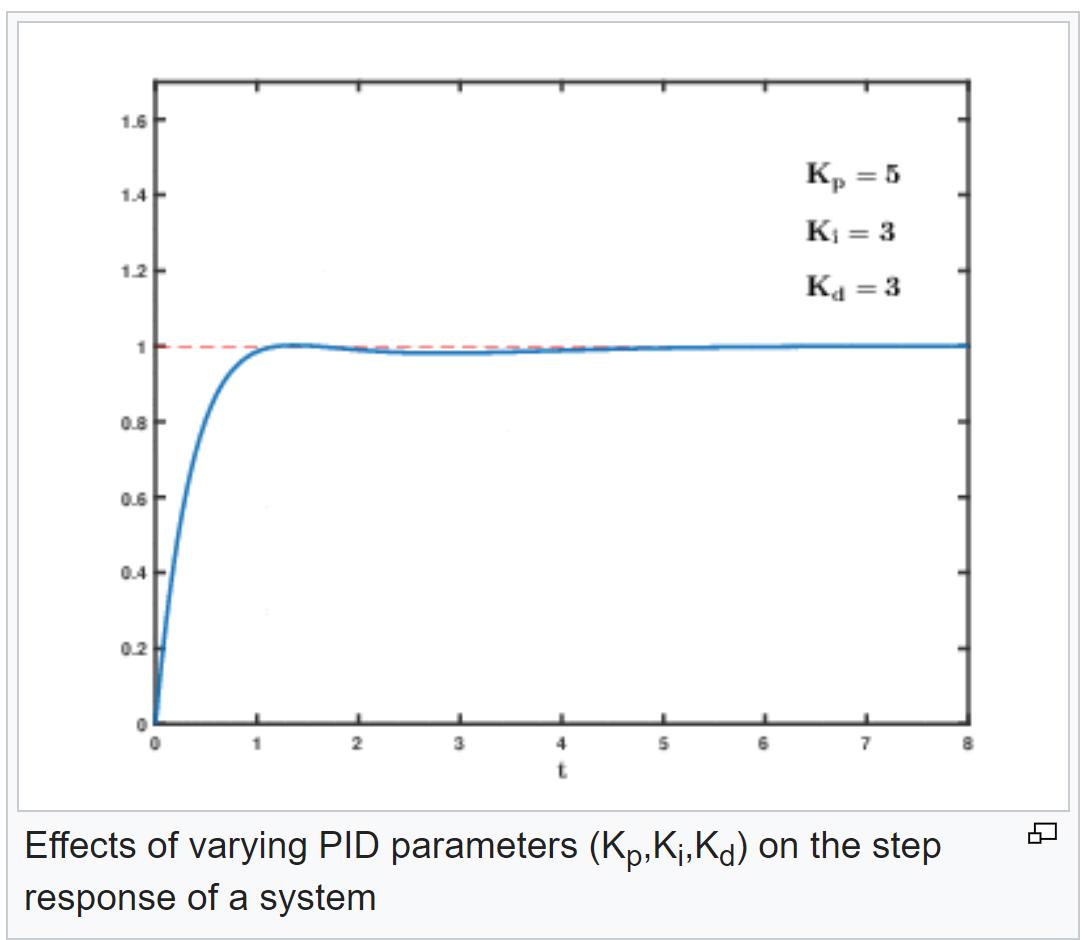
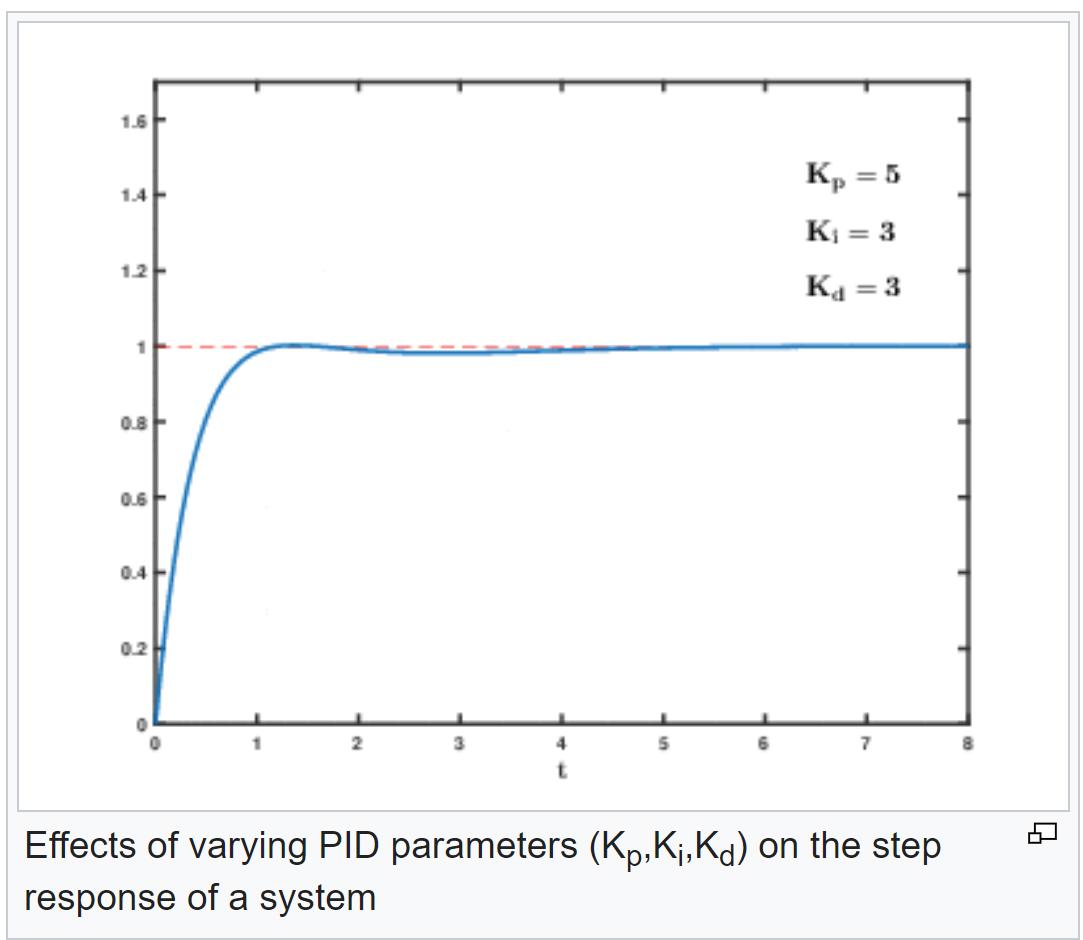
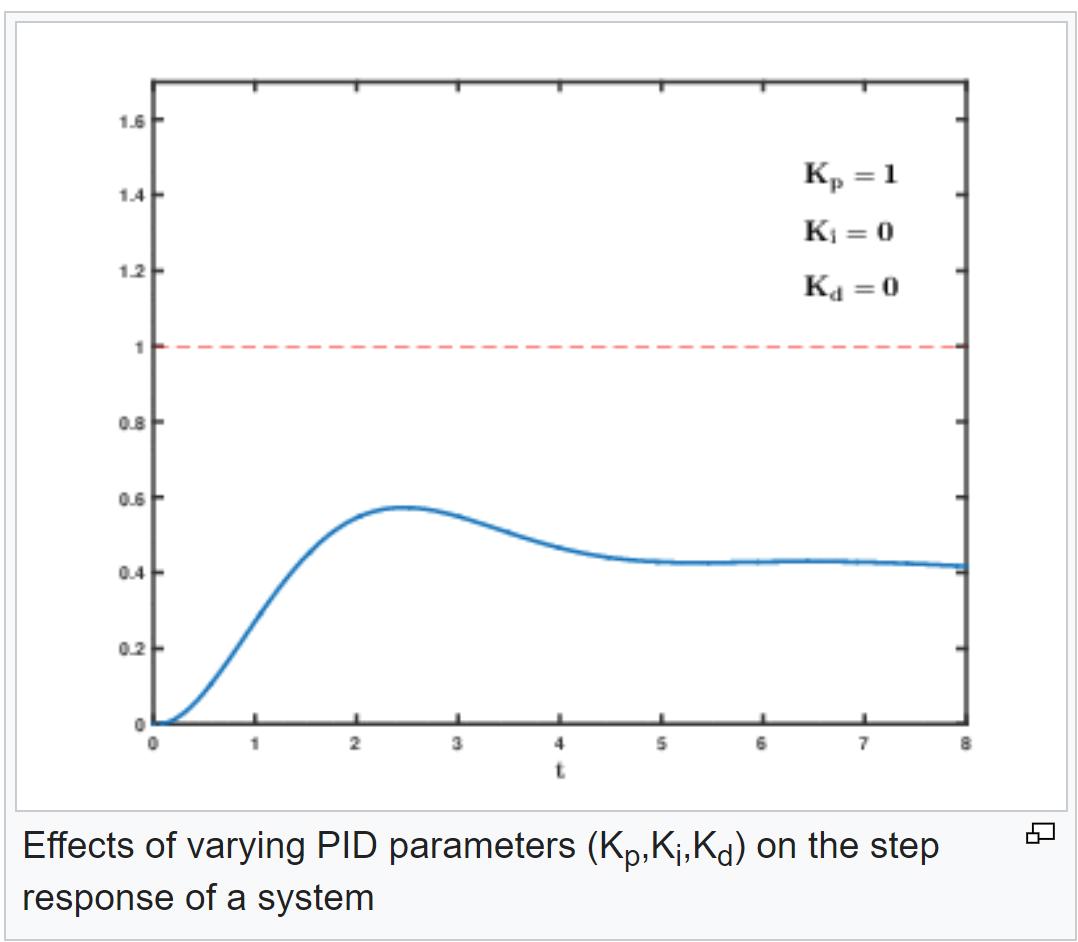
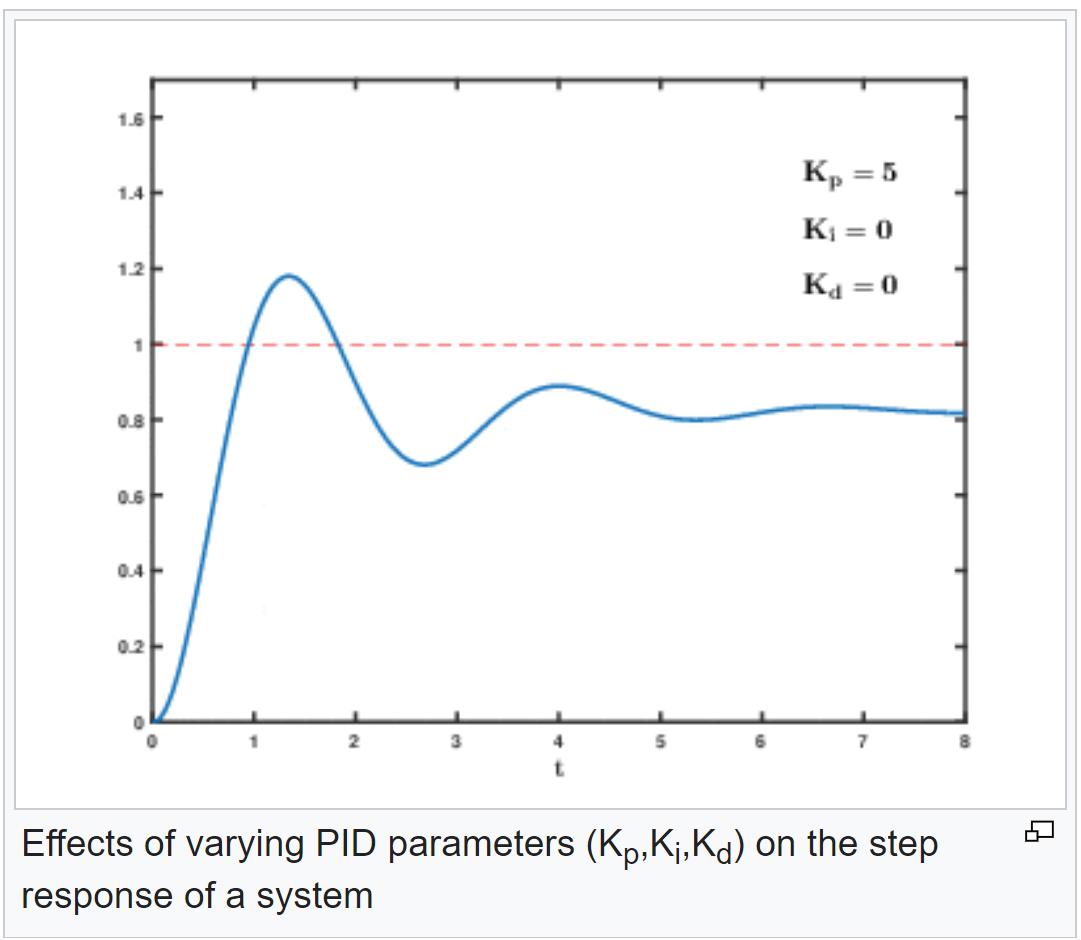
Bilderna visar en PID-regulator, men det skulle kunna vara vilken typ av regulator som helst. De två första bilderna illustrerar då regulatorn har ett kvarstående fel (den andra bilden kan man tänka sig att regulatorn med tiden ser ut att svänga in mot ett kvarstående fel). I den tredje bilden åtgärdas det kvarstående felet (i fallet med PID-regulator åtgärdas det genom att införa Ki). I den fjärde bilden får man en regulator som snabbt anpassar sig till börvärdet utan overshoot, och samtidigt undviker ett kvarvarande fel. Det gör man i en PID-regulator genom att införa Kd.
Man hade alltså kunnat besvara tentauppgiften med antingen bild 1 eller bild 2 som illustrerar "steady state error", och antingen bild 3 eller bild 4 som illustrerar "zero steady state error"

JohanF skrev:Hej!
Jag tror man bara är ute efter principen med vad som menas med ett kvarstående fel i en regulator. Som jag tolkar det så skulle "Unit step input" till exempel kunna vara en rumstermostat som man plötsligt höjer med en grad (börvärdet). Och "output response" är processvariablen, den uppmätta temperaturen i rummet som man ju gärna vill ska följa börvärdet på ett bra sätt.
Nedanstånde bilder är saxat ifrån wikipedia https://en.wikipedia.org/wiki/Proportional%E2%80%93integral%E2%80%93derivative_controller "Manual tuning"-sektionen.
Bilderna visar en PID-regulator, men det skulle kunna vara vilken typ av regulator som helst. De två första bilderna illustrerar då regulatorn har ett kvarstående fel (den andra bilden kan man tänka sig att regulatorn med tiden ser ut att svänga in mot ett kvarstående fel). I den tredje bilden åtgärdas det kvarstående felet (i fallet med PID-regulator åtgärdas det genom att införa Ki). I den fjärde bilden får man en regulator som snabbt anpassar sig till börvärdet utan overshoot, och samtidigt undviker ett kvarvarande fel. Det gör man i en PID-regulator genom att införa Kd.
Man hade alltså kunnat besvara tentauppgiften med antingen bild 1 eller bild 2 som illustrerar "steady state error", och antingen bild 3 eller bild 4 som illustrerar "zero steady state error"
Tack så mycket för svar! Du är duktig på att förklara!:) Tycker det här ämnet är väligt svårt och har mycket att lära mig även om jag redan gått igenom kursen:( Men så bild 3 räknas också som zero steady state error även om det finns overshoot med?
Ja det det är riktigt. Eftersom en overshoot är ett kortvarigt (övergående) fel, inte ett "steady state error". Inte ens ifall oscillationen inte klingar av med tiden är det ett steady state error.
JohanF skrev:Ja det det är riktigt. Eftersom en overshoot är ett kortvarigt (övergående) fel, inte ett "steady state error". Inte ens ifall oscillationen inte klingar av med tiden är det ett steady state error.
Ah okej då förstår jag tack!
