
Rotort
Hej, försöker plotta en rotort men får inte riktigt till det, tror jag misstolkat texten eller nånting liknande.
Uppgiftstexten verkar vilja att man ska skriva det på formen rlocus(Q/P), men förespråkar annars rlocus(Gc), vilket är vad jag är van vid att se.


a) Gick bra. Där fungerade min kod utmärkt. Tänkte lösa b) på liknande sätt, men det är där jag fastnar.


Problemet är att min plot av rotorten inte stämmer överens med facits, oavsett val av KI. Nu menar jag inte att grafen är lite förskjuten, för då kan man ju förstå att det är val av KI som skiljer, utan att formen på hela systemet är annorlunda.
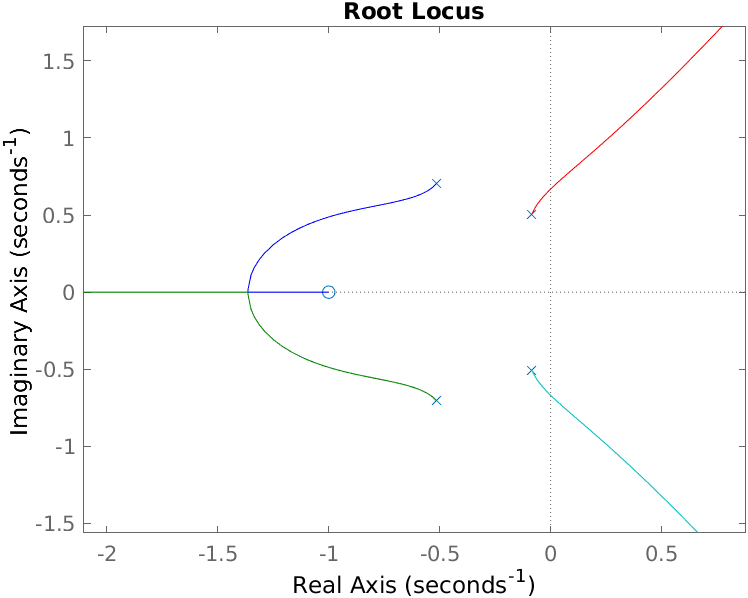
Det jag får:
Min kod:
G=tf([0.2],[1 1 1]) * tf([1],[1 0.2]);
Kp=1;
KI= 1;
K = Kp + KI/s;
Gc=feedback(K*G,1);
rlocus(Gc)
Facits graf:

Vad kan ha gått fel här? Blir förvirrad av att det gick så bra att ta fram rotorten för a) men svårt på b).
