
När använda pull-up kontra pull-down?
Hej! Jag behöver lite hjälp kring hur man resonerar på uppgift 16 b).
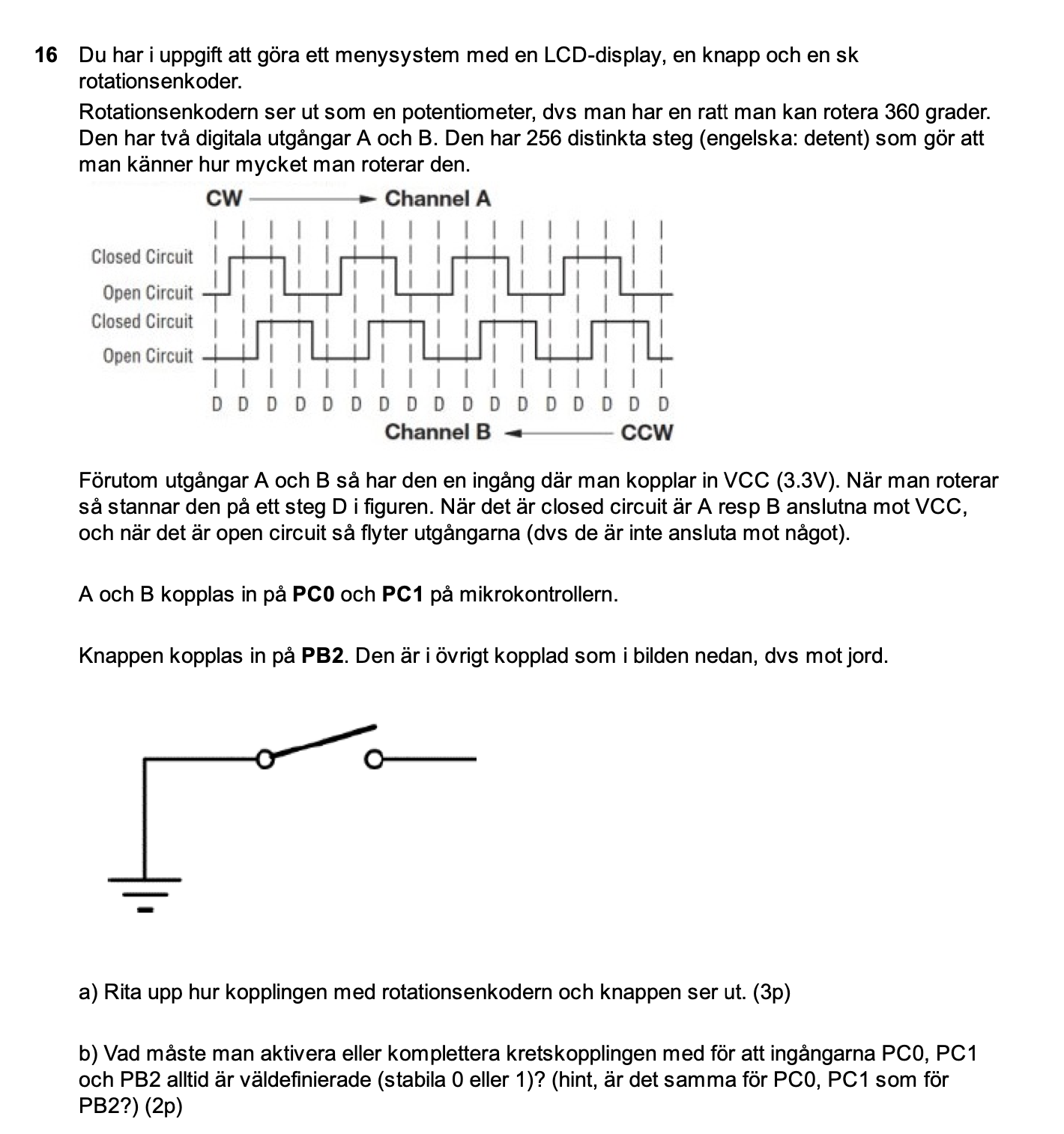
Det står ju i uppgiften att "när det är closed circuit är A och B anslutna till VCC", detta borde väl innebära att vi behöver sätta pull-down motstånd på A och B, för annars är de väl alltid "1"?
Ska PB2 ha pull-down eller pull-up motstånd här, och varför?
Om man jämför med den tidigare uppgiften, hur ska jag resonera kring pull-up och pull-down här?
Ber om ursäkt för rörigt inlägg.

Hej!
Vi kan ta första uppgiften med LCD-displayen först, så kommer du kanske att själv kunna lista ut hur man gör med hastighetsstyrningen.
Det står ju i uppgiften att "när det är closed circuit är A och B anslutna till VCC", detta borde väl innebära att vi behöver sätta pull-down motstånd på A och B, för annars är de väl alltid "1"?
Ja! Du resonerar redan korrekt. pullup/pulldown säkerställer det tillstånd som inte kan åstadkommas av mikrocontrollern/switchen.
Ofta är elektriska utgångar på microcontrollers konstruerade så att de har ett två tillstånd där det ena tillståndet är "flytande". Så har den som tillverkar microcontrollers gjort för att låta den som designar ett kretskort med en microcontroller som ska utföra en viss specifik funktion, kunna ta hänsyn till:
- Hur kommer kretskortets utgångar att stå när man spänningssätter kretskortet, ögonblicket före microkontrollern har "vaknat" och koden börjar snurra (det kan kanske ta någon sekund för den att boota up etc)? Utgångarna måste under den tiden stå på ett sådant sätt så att det som styrs av kretskortet (till exempel en LCD) inte tar skada, eller blinkar styggt, eller på annat sätt uppför sig på ett sätt som upplevs fult.
- Hur kommer kretskortets utgångar att stå ifall microcontrollern hänger sig, dvs den blir plötsligt oförmögen att styra sina utgångar ? (Hänga sig ska den naturligtvis inte göra, men ibland har man otur...). Utgångarna ska kanske då stå på ett sådant sätt att LCD'n på ett konsekvent sätt kan meddela användaren att funktionen inte uppfylls.
De här "microcontrolleroberoende" tillstånden möjliggörs med pull-up eller pull-down funktioner i hårdvaran.
Så, ska switchen ha en pullup eller pulldown? Resonera på samma sätt som för LCD'n.
JohanF skrev:Hej!
Vi kan ta första uppgiften med LCD-displayen först, så kommer du kanske att själv kunna lista ut hur man gör med hastighetsstyrningen.
Det står ju i uppgiften att "när det är closed circuit är A och B anslutna till VCC", detta borde väl innebära att vi behöver sätta pull-down motstånd på A och B, för annars är de väl alltid "1"?
Ja! Du resonerar redan korrekt. pullup/pulldown säkerställer det tillstånd som inte kan åstadkommas av mikrocontrollern/switchen.
Ofta är elektriska utgångar på microcontrollers konstruerade så att de har ett två tillstånd där det ena tillståndet är "flytande". Så har den som tillverkar microcontrollers gjort för att låta den som designar ett kretskort med en microcontroller som ska utföra en viss specifik funktion, kunna ta hänsyn till:
- Hur kommer kretskortets utgångar att stå när man spänningssätter kretskortet, ögonblicket före microkontrollern har "vaknat" och koden börjar snurra (det kan kanske ta någon sekund för den att boota up etc)? Utgångarna måste under den tiden stå på ett sådant sätt så att det som styrs av kretskortet (till exempel en LCD) inte tar skada, eller blinkar styggt, eller på annat sätt uppför sig på ett sätt som upplevs fult.
- Hur kommer kretskortets utgångar att stå ifall microcontrollern hänger sig, dvs den blir plötsligt oförmögen att styra sina utgångar ? (Hänga sig ska den naturligtvis inte göra, men ibland har man otur...). Utgångarna ska kanske då stå på ett sådant sätt att LCD'n på ett konsekvent sätt kan meddela användaren att funktionen inte uppfylls.
De här "microcontrolleroberoende" tillstånden möjliggörs med pull-up eller pull-down funktioner i hårdvaran.
Så, ska switchen ha en pullup eller pulldown? Resonera på samma sätt som för LCD'n.
Tack för ett informativt svar! Angående PB2 på Rotationsenkoder uppgiften: När knappen trycks ner så blir PB2 låg, därav behöver vi sätta pull-up motstånd på PB2, för annars kommer den alltid att vara låg. Korrekt?
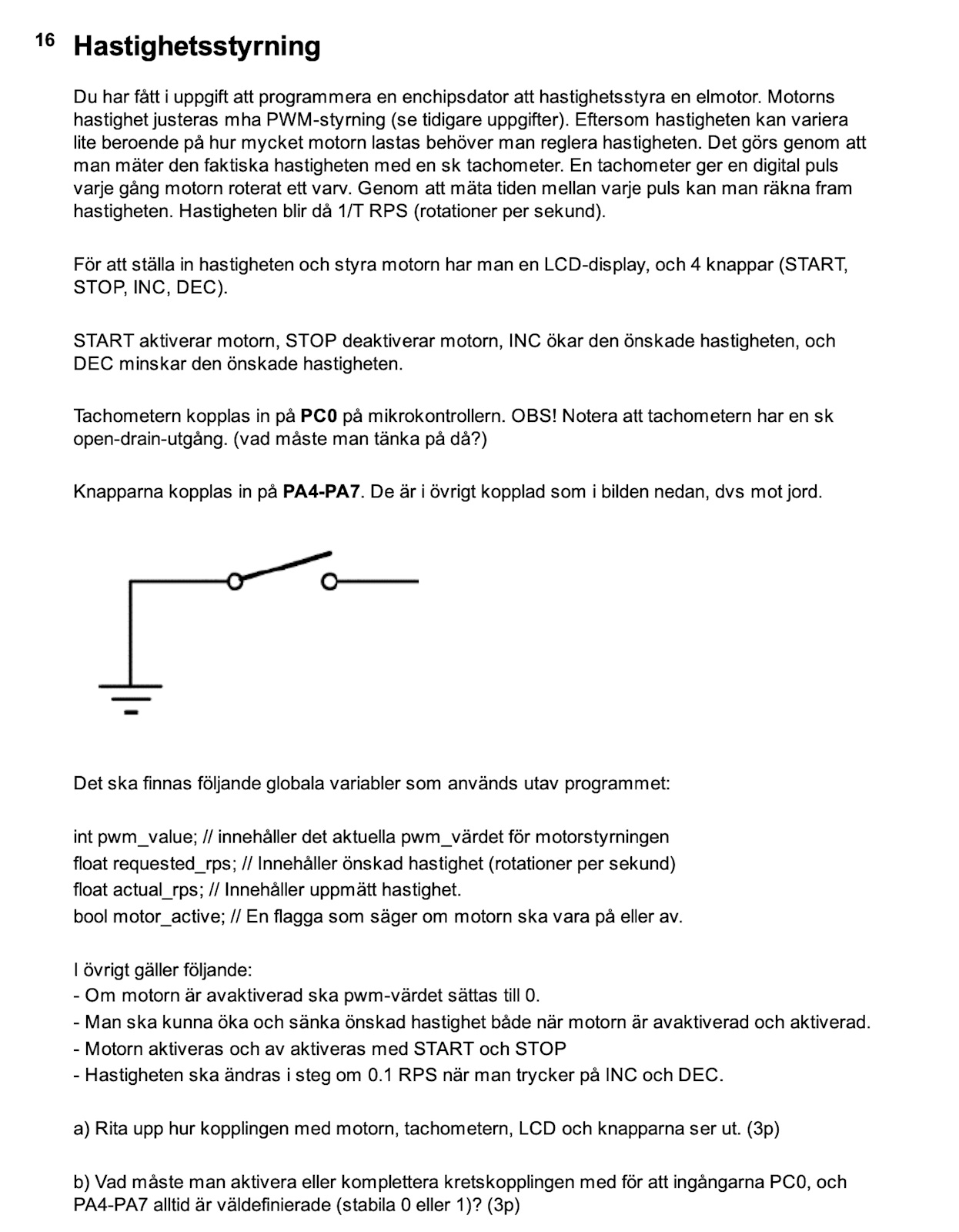
Och Tachometer uppgiften: Tachometern har open-drain utgång och då behöver vi koppla på ett externt pull-up motstånd. PA4-P7 följer samma resonemang som PB2 i rotationsenkoder uppgiften, dvs att de också ska ha pull-up motstånd, för annars är de alltid låga.
Är detta korrekt?
Linnzan skrev:JohanF skrev:Hej!
Vi kan ta första uppgiften med LCD-displayen först, så kommer du kanske att själv kunna lista ut hur man gör med hastighetsstyrningen.
Det står ju i uppgiften att "när det är closed circuit är A och B anslutna till VCC", detta borde väl innebära att vi behöver sätta pull-down motstånd på A och B, för annars är de väl alltid "1"?
Ja! Du resonerar redan korrekt. pullup/pulldown säkerställer det tillstånd som inte kan åstadkommas av mikrocontrollern/switchen.
Ofta är elektriska utgångar på microcontrollers konstruerade så att de har ett två tillstånd där det ena tillståndet är "flytande". Så har den som tillverkar microcontrollers gjort för att låta den som designar ett kretskort med en microcontroller som ska utföra en viss specifik funktion, kunna ta hänsyn till:
- Hur kommer kretskortets utgångar att stå när man spänningssätter kretskortet, ögonblicket före microkontrollern har "vaknat" och koden börjar snurra (det kan kanske ta någon sekund för den att boota up etc)? Utgångarna måste under den tiden stå på ett sådant sätt så att det som styrs av kretskortet (till exempel en LCD) inte tar skada, eller blinkar styggt, eller på annat sätt uppför sig på ett sätt som upplevs fult.
- Hur kommer kretskortets utgångar att stå ifall microcontrollern hänger sig, dvs den blir plötsligt oförmögen att styra sina utgångar ? (Hänga sig ska den naturligtvis inte göra, men ibland har man otur...). Utgångarna ska kanske då stå på ett sådant sätt att LCD'n på ett konsekvent sätt kan meddela användaren att funktionen inte uppfylls.
De här "microcontrolleroberoende" tillstånden möjliggörs med pull-up eller pull-down funktioner i hårdvaran.
Så, ska switchen ha en pullup eller pulldown? Resonera på samma sätt som för LCD'n.
Tack för ett informativt svar! Angående PB2 på Rotationsenkoder uppgiften: När knappen trycks ner så blir PB2 låg, därav behöver vi sätta pull-up motstånd på PB2, för annars kommer den alltid att vara låg. Korrekt?
Och Tachometer uppgifiten: Tachometern har open-drain utgång och då behöver vi koppla på ett externt pull-up motstånd. PA-P7 följer samma resonemang som PB2 i rotationsenkoder uppgiften, dvs att de också ska ha pull-up motstånd, för annars är de alltid låga.
Är detta korrekt?

Så här tänker jag att kopplingarna ser ut, på ett ungefär!
Tack för ett informativt svar! Angående PB2 på Rotationsenkoder uppgiften: När knappen trycks ner så blir PB2 låg, därav behöver vi sätta pull-up motstånd på PB2, för annars kommer den alltid att vara låg. Korrekt?
Ja, det är rätt!
Och Tachometer uppgiften: Tachometern har open-drain utgång och då behöver vi koppla på ett externt pull-up motstånd. PA4-P7 följer samma resonemang som PB2 i rotationsenkoder uppgiften, dvs att de också ska ha pull-up motstånd, för annars är de alltid låga.
Stämmer! Bra!
JohanF skrev:Tack för ett informativt svar! Angående PB2 på Rotationsenkoder uppgiften: När knappen trycks ner så blir PB2 låg, därav behöver vi sätta pull-up motstånd på PB2, för annars kommer den alltid att vara låg. Korrekt?
Ja, det är rätt!
Och Tachometer uppgiften: Tachometern har open-drain utgång och då behöver vi koppla på ett externt pull-up motstånd. PA4-P7 följer samma resonemang som PB2 i rotationsenkoder uppgiften, dvs att de också ska ha pull-up motstånd, för annars är de alltid låga.
Stämmer! Bra!
Tusen tack!
Linnzan skrev:Linnzan skrev:JohanF skrev:Hej!
Vi kan ta första uppgiften med LCD-displayen först, så kommer du kanske att själv kunna lista ut hur man gör med hastighetsstyrningen.
Det står ju i uppgiften att "när det är closed circuit är A och B anslutna till VCC", detta borde väl innebära att vi behöver sätta pull-down motstånd på A och B, för annars är de väl alltid "1"?
Ja! Du resonerar redan korrekt. pullup/pulldown säkerställer det tillstånd som inte kan åstadkommas av mikrocontrollern/switchen.
Ofta är elektriska utgångar på microcontrollers konstruerade så att de har ett två tillstånd där det ena tillståndet är "flytande". Så har den som tillverkar microcontrollers gjort för att låta den som designar ett kretskort med en microcontroller som ska utföra en viss specifik funktion, kunna ta hänsyn till:
- Hur kommer kretskortets utgångar att stå när man spänningssätter kretskortet, ögonblicket före microkontrollern har "vaknat" och koden börjar snurra (det kan kanske ta någon sekund för den att boota up etc)? Utgångarna måste under den tiden stå på ett sådant sätt så att det som styrs av kretskortet (till exempel en LCD) inte tar skada, eller blinkar styggt, eller på annat sätt uppför sig på ett sätt som upplevs fult.
- Hur kommer kretskortets utgångar att stå ifall microcontrollern hänger sig, dvs den blir plötsligt oförmögen att styra sina utgångar ? (Hänga sig ska den naturligtvis inte göra, men ibland har man otur...). Utgångarna ska kanske då stå på ett sådant sätt att LCD'n på ett konsekvent sätt kan meddela användaren att funktionen inte uppfylls.
De här "microcontrolleroberoende" tillstånden möjliggörs med pull-up eller pull-down funktioner i hårdvaran.
Så, ska switchen ha en pullup eller pulldown? Resonera på samma sätt som för LCD'n.
Tack för ett informativt svar! Angående PB2 på Rotationsenkoder uppgiften: När knappen trycks ner så blir PB2 låg, därav behöver vi sätta pull-up motstånd på PB2, för annars kommer den alltid att vara låg. Korrekt?
Och Tachometer uppgifiten: Tachometern har open-drain utgång och då behöver vi koppla på ett externt pull-up motstånd. PA-P7 följer samma resonemang som PB2 i rotationsenkoder uppgiften, dvs att de också ska ha pull-up motstånd, för annars är de alltid låga.
Är detta korrekt?
Så här tänker jag att kopplingarna ser ut, på ett ungefär!
Ja, det blir ett "pseudo-kopplingsschema", dvs bara de viktigaste kopplingarna och funktionsblocken finns med i schemat (tex det måste även finnas VCC och gnd till mikrokontrollern, och säkert en del andra kopplingar också, men det tycks mindre viktigt i uppgiften).
I första uppkopplingen ingår det också en LCD-display, men det står egentligen inte att man ska rita den i uppgiften, så den kan nog utelämnas.
I andra uppkopplingen ingår det också pwm-styrning av motorn, förutom den monitorering av motorn via varvräknaren som du redan ritat. Styrningen av motorn måste man rita in eftersom det är en vital del av den reglering som ska implementeras i mikrokontrollern.
Det är lite oklart huruvida man ska rita in pullup/pulldown-resistorerna i schemat också. Men de kanske inte behöver vara med i schemat, eftersom de kommer på b-frågan.
Hänger du med?
