
Linjär algebra. Beräkna e2 x (2e1 - e2 + 3e3)
Hej, jag skulle behöva hjälp med följande uppgift:
Beräkna e2 x (2e1 - e2 + 3e3)
Jag har lyckats förenkla uttrycket till det här:
(e2 x e1)2-(e2 x e3)3 = ...
Sedan vet jag inte hur jag ska göra.
Jag vet visserligen att det finns ett schema med e1 x e2 = -e3 och med e2 x e3 = e1, men jag förstår inte varför det blir så.
Det som jag tror mig veta är att tre vektorer sägs vara positivt orienterade om den minsta vridning som överför den första i den andra sett från spetsen av den tredje sker moturs, och negativt orienterade om den minsta vridning som överför den första i den andra sker medurs sett från spetsen av den tredje.
Och att det finns en högerhands-regel man kan använda men jag förstår inte riktigt hur man gör?


Högerhandsregler finns det många av, kanske kan den här vara tydlig:
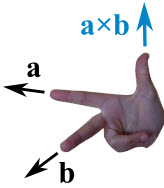
Det viktigt att lägga märke till uppräkningsordningen av basvektorerna (1,2,3)
Om de är högerorienterade och man räknar upp dem i rätt ordning (jämn permutation) är svaret positivt.
(1,2,3)
(2,3,1)
(3,1,2)
Om vi däremot räknar upp dem i fel ordning (udda permutation) blir svaret negativt
(1,3,2)
(2,1,3)
(3,2,1)
I ditt exempel har du
Jag tror att jag förstår nu, tack så mycket!
