
Bestäm den minsta kraften P för att en rotation ska uppstå.
Hej! Jag har problem med följande uppgift:

Så här har jag tänkt:
 Jag tänkte, efter många om och men, att man kan ta vridmomentet med avseende på B och sätta B till origo.
Jag tänkte, efter många om och men, att man kan ta vridmomentet med avseende på B och sätta B till origo.
Sedan beräknade jag en ortsvektor mellan B och kraften P:s verkningslinje, rOA som blev (x1,0,0) och efter det beräknade jag en ortsvektor rOF mellan B och fjäderkraftensverkningslinje och fick den till (0,y1,-d). Jag kom fram till att fjäderkraften borde verka i negativ x-axel riktning så satte dess längd till -ks.
Jag tänker att kraften P bidrar med ett moturs vridmoment och fjäderkraften med ett medurs vridmoment. När dessa är lika tänkte jag att man är vid ett "gränsfall" och att rotation precis är på väg att uppstå.
Jag tog kryssprodukten och satte (x1i+0j+0k) x Pk = (0i + y1j-dk) x (-ksi). Men då fick jag att Pj =(-ksy1k+dsj)x1 vilket inte kan vara rätt för svaret ska inte uttryckas i termer av y1. Nu vet jag inte hur man kan gå vidare. Stort tack för tips!

Fjäderkraft
Det första att fundera på är vad kraften i fjädern är. Du har skrivit , stämmer det verkligen?
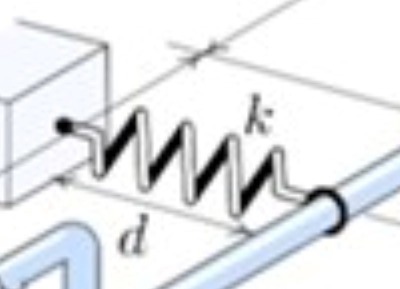
Det står i uppgiften att osträckt längd är , vad innebär det? Notera att man kan se i bilden att dess längd vid tillfället som ska analyseras är .

Friläggning
Du får gärna för mitt intresses skull förklara vad denna bild ska föreställa:

Du skriver friläggning men jag förstår inte... Massa krafter och moment saknas. Har du frilagt alla delar/länkar på något vis? De ligger mest huller om buller.
Ortsvektor
Du formulerade följande:

Borde inte komponenten i z-led ha storleken ? Du har skrivit men den variabeln mäts i x-led. Du har:

Från B till där fjädern sitter fast i stången har du:

Hej! Oj, tack så mycket, fjäderkraften har jag gjort fel. Den blir väl istället F= k*(d-s)? Sen har jag räknat ut ortsvektorn fel också förstår jag.
Sen när det gäller den så kallade friläggningen så har jag jättesvårt att förstå vilka krafter som verkar och vilka man ska ha med när man frilägger i uppgifter. Jag vill gärna bli bättre på det. Tror du att du skulle kunna förklara vilka krafter och moment som jag har missat? Jag har typ försökt frilägga olika delar av röret och ritat ut de krafter som jag tror är med och påverkar.
Jag tänker mig kraften P vid A, sedan tänkte jag att jag tar momentet kring B så krafterna där behöver jag inte tänka så mycket på i första deluppgiften (fast de måste jag beräkna senare).
Och sedan antar jag att det verkar krafter vid C och D också men eftersom jag varken förstod hur jag skulle uttrycka dem termer som av variabler som jag känner eller förstod exakt vilka krafter de rörde sig om hoppades jag att de inte skulle vara med och påverka momentet. Och de moment som jag har missat förstår jag inte var de skulle komma ifrån eller var de är?
Tack så mycket för hjälpen.
Det verkar finnas några kunskapsluckor här.
En friläggning som är lämplig här är att rita ut de krafter som verkar på länksystemet som helhet. Det kan du rita genom att bara rita några streck och rita ut krafterna:

Du vet att du har en kraft vid A:

Denna skapar då ett moturs moment sett från negativa sidan av y-axeln. Detta motverkas då av fjäderkraften:

Men vad är krafterna i B, C och D? Kan du rita ut dem? Tänk mycket noga på frågeställningen
", kraften som krävs för att påbörja rotation".
Hmm. Jag tror inte det tyvärr...eftersom massan försummas borde en normalkraft finnas vid C men ingen tyngdkraft och likadant för D och B? Och alla normalkrafter är riktade uppåt så de bidrar till moturs-momentet? Kraften som krävs för att påbörja en rotation...kanske måste kraften P, kraften vid B, kraften vid C och kraften vid D tillsammans vara lika stora som fjäderkraften?
Ellinor skrev:
Hmm. Jag tror inte det tyvärr...eftersom massan försummas borde en normalkraft finnas vid C men ingen tyngdkraft och likadant för D och B?
Tyngdkraften skulle komma från massan på hela länksystemet och agera i dess masscentrum. Det är normalt inget som du distribuerar ut i punkterna B, C och D utan vidare. Men mycket riktigt ska tyngdkraften försummas eftersom massan på länksystemet försummas.
Och alla normalkrafter är riktade uppåt så de bidrar till moturs-momentet?
Normalkrafter är per definition krafter som agerar normalt till en yta. De behöver inte agera "uppåt". Men du är något på spåren här, även om det skulle kunna vara så att momentet från fjäderkraften och momentet från tar ut varandra.
Kraften som krävs för att påbörja en rotation...kanske måste kraften P, kraften vid B, kraften vid C och kraften vid D tillsammans vara lika stora som fjäderkraften?
Du är på god väg men borde systematisera det lite för att göra det enklare för dig. Det gängse sättet att göra på är att dela upp det i alla led. Alltså, x-led, y-led och z-led. Sedan räknar du kraft- och momentjämvikt.
Kom ihåg koordinatsystemet som de ställt upp för problemet:

Alltså ska vi ha osv.
kanske måste kraften P, kraften vid B, kraften vid C och kraften vid D tillsammans vara lika stora som fjäderkraften?
Ja, du har förstått rätt. Eftersom du i detta problem vill ha statisk jämvikt måste det vara kraftjämvikt i x-led. Alltså kan inte fjäderkraften agera själv i x-led, det måste finnas reaktionskrafter i B, C eller D som motverkar fjäderkraften. Men tänk på att agerar i z-led, så den kan inte motverka fjäderkraften i en kraftjämvikt.
Liten ledning
För punkterna B och C är det uppenbart från bilden att stöden där inte kan ta upp några krafter eller moment i y-led då de är vad jag skulle kalla glidleder eller andra kanske kallar fria gångjärnsleder.

De kan bara ta upp krafter i x- och z-led samt moment i x- och z-led.
Kan du rita ut dessa okända krafter och moment?
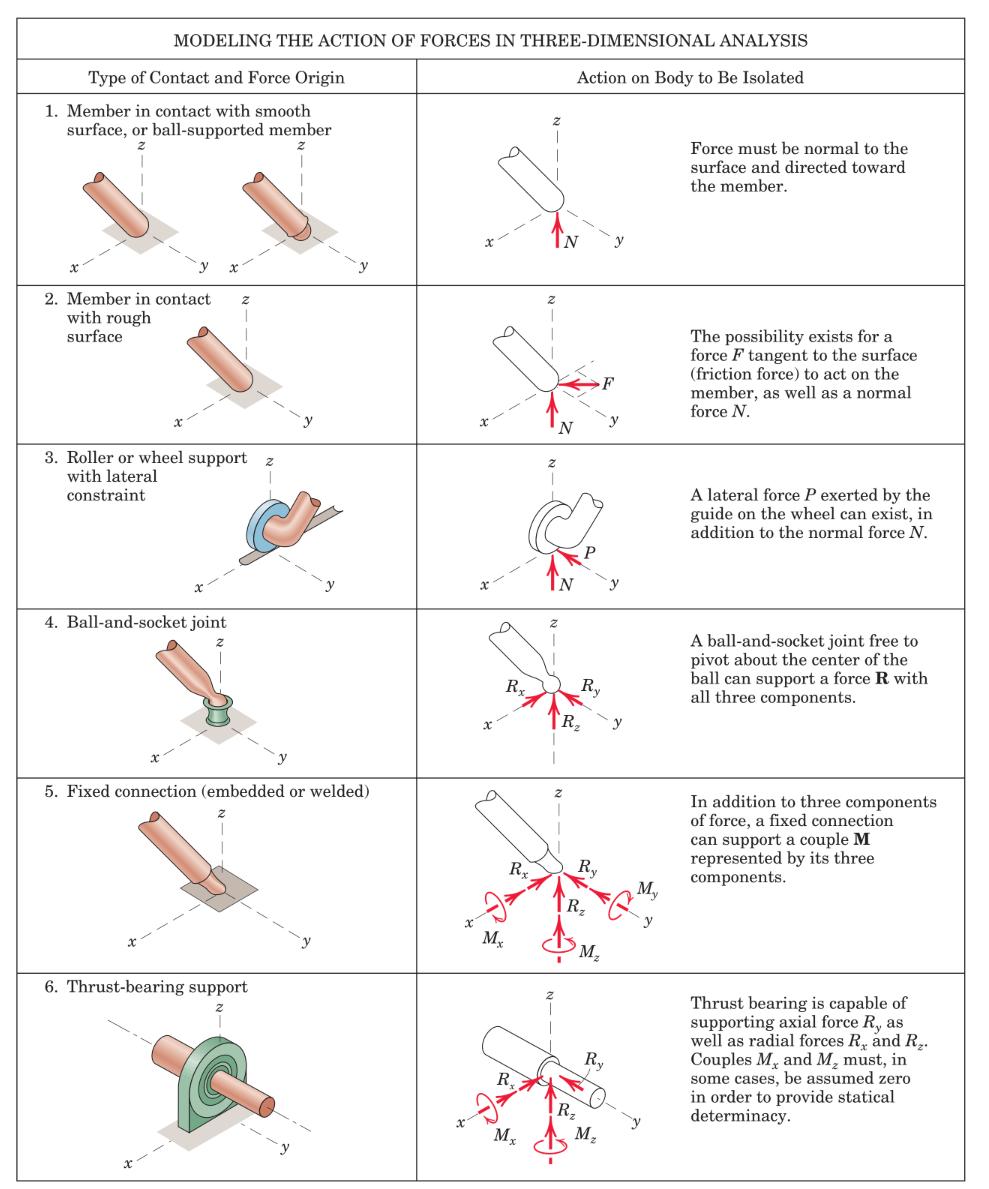
Tips kan hämtas från tabeller som denna:
Ytterligare ledning
Sedan kan du ta andra genvägar genom att göra om problemet till ett tvådimensionellt problem och kapa ännu fler okända, men det kan vi ta när du kommit lite längre.
Hej! Tack så mycket för svar.
Jag har försökt rita ut alla krafter och moment nu med hjälp av tabellen:
 För punkten D använde jag mig av (1) i tabellen och för C och B använde jag mig av (6) i tabellen. Tycker du att detta ser rätt ut?
För punkten D använde jag mig av (1) i tabellen och för C och B använde jag mig av (6) i tabellen. Tycker du att detta ser rätt ut?
Jag förstår att minst en av krafterna i x-led vid B eller C behöver vara negativa för att ta ut fjäderkraften.
När jag försöker föreställa mig rotationen som fjäderkraften och P ger upphov till föreställer jag mig att röret börjar rotera kring y-axeln. Stämmer det?
Tusen tack.


Du är på god väg. Om du nu beräknar momentet kring y axeln lagd genom punkterna B och C, vad får du då?
Notis om moment:
Något moment vid A kring y finns inte (). I den punkten finns nämligen inget randvillkor som kan ta upp last utan enbart den yttre lasten .
Sedan finns inget moment vid punkten som fjädern sitter fast i (). Först och främst sitter den i en ring runt länken:
Sedan kan det nog antas att fjädern sitter fast i ringen i någon form av Ball-and-socket joint. Jämför med när du har en kabel eller ett snöre som drar med en kraft, du får då inget moment i fästpunkten.
Om du tar bort dessa moment, hur många okända har du då i din momentekvation?
Tillägg om antal okända
Antal okända
Man kan alltid börja en friläggning med alla krafter och alla moment i varje punkt för alla olika randvillkor. Problemet då blir naturligtvis att du måste ha lika många ekvationer som okända för att fullständigt lösa ett problem. För ett 3D-problem har du 6 st jämviktsekvationer, kraft och moment i varje riktning. I din nuvarande friläggning har du 10 st okända.
När du har för många okända är systemet statiskt obestämt (statically indeterminant). Det är vad PATENTERAMERA hänvisar till. Alltså att man ofta behöver rationalisera bort krafter och moment för att kunna lösa ett problem. Detta kan vara svårt. Fördelen med dina studier i mekanik är att det normalt nästan uteslutande rör sig om statiskt bestämda problem.
Alltså är problemet formulerat så att man kan bortse från friktion, att vissa krafter och moment kan strykas osv.
Hej! Jag förstår.
Då behöver jag alltså anta att en del moment och krafter blir 0. Då kan jag enligt texten anta att Mz och Mx är noll. Då har jag 6 obekanta kvar. Att Mz och Mx vid B är 0 är till och med helt säkert eftersom jag ska ta momentet med avseende på B.
Sedan måste jag genomföra beräkningen. Här blev jag väldigt osäker: är det bäst att använda kryssprodukten eller formeln F*d?
Jag har fått lära mig att allmänt sett är kryssprodukten överlägsen när det gäller 3D-problem. Men eftersom jag inte vet riktningarna för krafterna vid C så vet jag inte om vektorn Fx = Fx(i+k)/|Fx| eller om den är lika med Fx(-i-k)/|Fx| och så vidare.
Men om jag ska använda F * d formeln så brukar det ju vara så att man beräknar Mx My och Mz, där man först tar respektive kraft och multiplicerar med dess vinkelräta avstånd till x-axeln, och sedan samma sak för y-axlen och z-axeln, såvida kraften inte är parall med den aktuella axeln för då kan den inte vrida kring den axeln och vridmomentet blir 0.
Men i den här uppgiften förstår jag inte hur det skulle gå till. För att om jag sätter B=origo blir kraften P parallell med z-axeln och då utövar den väl inget moment kring z-axeln och P försvinner från min ekvation?
Väldigt mycket att packa upp här.
Tänk på vad jag skrev i #9:
Du är på god väg. Om du nu beräknar momentet kring y axeln lagd genom punkterna B och C, vad får du då?
I övrigt hinner jag bara två av sakerna, och det är väl de viktigaste:
Jag har fått lära mig att allmänt sett är kryssprodukten överlägsen när det gäller 3D-problem. Men eftersom jag inte vet riktningarna för krafterna vid C så vet jag inte om vektorn Fx = Fx(i+k)/|Fx| eller om den är lika med Fx(-i-k)/|Fx| och så vidare.
Du vet riktningarna. Du ställer nämligen upp dem kartesiskt. Med andra ord är en kraft med en riktning parallell med x-axeln osv.
Men i den här uppgiften förstår jag inte hur det skulle gå till. För att om jag sätter B=origo blir kraften P parallell med z-axeln och då utövar den väl inget moment kring z-axeln och P försvinner från min ekvation?
Du kan beräkna moment kring x, y, eller z. Beroende på val kommer olika okända krafter/moment dyka upp i dina ekvationer.
Du skulle istället kunna beräkna kring en axel genom B, parallell med x-axeln, men det är inte optimalt.
Ett annat sätt kan eliminera fler okända, men hur?
Kraften i B söks
Sedan, om du nu ska beräkna moment kring en axel parallell med x eller z. Eftersom du söker kraften i B, är det inte bättre att beräkna moment i någon annan punkt? Vilken tror du?
Hej!
Hej! Tusen tack för svar.
Jag tänkte på det du sagt om att beräkna momentet med avseende på y-axeln lagd genom punkterna B och C. Då fick jag p*x1-(d-s)*k*h +Nd*x2 = 0. Eftersom rotation precis ska påbörjas satte jag Nd = 0 och fick då att P = (d-s)*k*h/x1 vilket blev rätt.
Är det rätt sätt att tänka på eller är det bara en slump att det blev rätt?
Jag förstår, det är bättre att beräkna momentet med avseende på en annan punkt än B eftersom krafterna vid B söks.
Men...det finns inget moment vid A, inget moment där fjäderkraften verkar, inget moment vid D, och för att få ner antalet okända i uppgiften antar vi att momenten vid B och C är 0. Därmed finns inga punkter att välja bland att beräkna moment med avseende på...? Annars hade det varit bra att beräkna moment kring C för att eliminera de okända krafterna vid C?
Lite tidigare skriver du att momentet vid A är 0 eftersom där inte finns några randvillkor som kan ta upp någon last. Finns det något enklare sätt att säga det på? Jag förstår nämligen inte riktigt vad som menas med "inga randvillkor som kan ta upp någon last"?
Tack så mycket.
Hmm, nu tog jag momentet med avseende på z-axeln genom C, och fick -Fbx*(y1+y2) + (d-s)*k*y2 = 0 vilket gav Fbx = (d-s)*k*y2/(y1+y2) vilket blev rätt. Men vi antog ju i uppgiften att momentet vid C skulle vara 0. Så jag är inte med på noterna riktigt.
Hmm, nu tog jag momentet med avseende på z-axeln genom C, och fick -Fbx*(y1+y2) + (d-s)*k*y2 = 0 vilket gav Fbx = (d-s)*k*y2/(y1+y2) vilket blev rätt. Men vi antog ju uppgiften att momentet vid C skulle vara 0. Så jag är inte med på noterna riktigt.
Ellinor skrev:Hej! Tusen tack för svar.
Jag tänkte på det du sagt om att beräkna momentet med avseende på y-axeln lagd genom punkterna B och C. Då fick jag p*x1-(d-s)*k*h +Nd*x2 = 0. Eftersom rotation precis ska påbörjas satte jag Nd = 0 och fick då att P = (d-s)*k*h/x1 vilket blev rätt.
Är det rätt sätt att tänka på eller är det bara en slump att det blev rätt?
Det är rätt. Om rotation påbörjats har kontakt släppt i punkten D. Då kan heller ingen kontaktkraft finnas. Så helt rätt att sätta Nd = 0.
Jag förstår, det är bättre att beräkna momentet med avseende på en annan punkt än B eftersom krafterna vid B söks.
Men...det finns inget moment vid A, inget moment där fjäderkraften verkar, inget moment vid D, och för att få ner antalet okända i uppgiften antar vi att momenten vid B och C är 0. Därmed finns inga punkter att välja bland att beräkna moment med avseende på...? Annars hade det varit bra att beräkna moment kring C för att eliminera de okända krafterna vid C?
Japp. Räkna moment kring punkten C är bra då vi inte bryr oss om de okända krafterna där.
Lite tidigare skriver du att momentet vid A är 0 eftersom där inte finns några randvillkor som kan ta upp någon last. Finns det något enklare sätt att säga det på? Jag förstår nämligen inte riktigt vad som menas med "inga randvillkor som kan ta upp någon last"?
Här skulle jag väl normalt ge rådet att du frågar Chat GPT då denna är väldigt bra på att förklara sådana saker på ett pedagogiskt sätt.
Enkelt sagt är randvillkor sådana strukturella detaljer som kan ta upp laster så som krafter och moment. Detta innebär att området är låst på något vis. Till exempel om den är ledat infäst kan punkten ta upp krafter i alla led. Alltså, "hålla emot" i alla riktningar. Därmed, när du frilägger, så bör du anta att det finns tre okända krafter i den punkten. Sedan finns det olika typer av leder som bara kan ta upp krafter i två led, eller bara ett led. Olika lager och glidleder, till exempel.
För punkten A är det bara en kraft P som anbringas i z-led. Du vet inte något mer än detta. Alltså, du kan inte anta att det finns något motstånd mot rörelse i någon riktning förutom kraften P i z-led.
Hmm, nu tog jag momentet med avseende på z-axeln genom C, och fick -Fbx*(y1+y2) + (d-s)*k*y2 = 0 vilket gav Fbx = (d-s)*k*y2/(y1+y2) vilket blev rätt. Men vi antog ju uppgiften att momentet vid C skulle vara 0. Så jag är inte med på noterna riktigt.
Jag är inte riktigt med på noterna kring vilka noter du inte är med på, tyvärr.
Först och främst: Du antar att reaktionsmomenten är lika med noll. Det är något helt annat än att kraften från fjädern kan anbringa ett nollskilt moment i punkten C.
För det andra: Kom ihåg att summan av kraftmoment är noll i alla punkter för att problemet är statiskt.
Tusen tack för all hjälp!
